
、射速,这些功能的实现都需要电控的调节。下面让小A为大家简单地介绍电控组的「撸代码」、「焊板子」具体都涉及些什么吧!
编写程序第一步是要一个能编写和测试程序的平台。IDE就是这么一类供开发者书写和编辑程序,并能编译和调试程序的软件。工作室使用的集成IDE是KeilμVision5(STM32)和ArduinoIDE。会使用STM32的同学还可以下载CubeMX进行图形化的初始配置,简单方便易操作。
编写程序其次必须了解到编写的规则,即计算机的「语言」。在Keil上最常用的代码语言是C、C++。Arduino,是一个基于开放原始码的软硬体平台,构建于开放原始码simple I/O介面版,并且具有使用类似JavaC语言的Processing/Wiring开发环境。
PID是一种经典的控制算法,根据系统的偏差来调整输入信号的线性反馈控制算法,本质上是一个涉及微积分的数学公式。通俗地说,它能根据传感器返回的机器人当前状态与目标状态(值)的偏差,微调对机器人发出的指令,使之保持稳定。这是实现对机器人稳定控制,及一些功率和射频等规则限制的关键点。除了经典PID以外,要想更精确的控制我们的机器人,还需要去学习更为「高深」的控制算法,比如ADRC、专家PID、模糊PID、自适应PID等。
编写好程序之后,通过了在电脑上的编译和调试,就要将程序输入接电路板上的处理器——微型计算机,也称单片机,进行运行。工作室常用的是AVR和ARM系列。
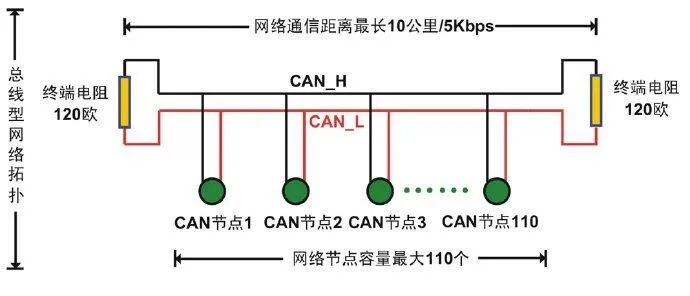
从电脑端将程序输入单片机,需要「通信」。机器人技术中的通信,指的是计算机和计算机之间端到端的数据传输,涉及通信接口的封装和通信协议。通信协议的类型有很多,一般Arduino采用的是IDE自带的串口监视器,同时也支持I2C、SPI,CAN等通信方式。
对于STM32而言,最常使用的是CAN通信,利用CAN通信控制的电调大幅度的提升了电机输出值的精准度,这是机器人比赛中做到「指哪打哪」的有力保障。
机器人是一个实现程序与现实世界交互的桥梁,而建立这座桥梁不可或缺的还有硬件,包括各种各样的传感器和电机。其中最重要的包括保证控制稳定的数据传感器——MPU6050,红外传感器,超声波传感器等等,传感器和电机的种类很多,因此选择正真适合的传感器及电机也是电控需要仔细斟酌的。
主要了解电路拓扑结构,学会电路分析。例如欧姆定律、戴维南定理、基尔霍夫定律等,都是在电路分析中必不可少的基本原理。
在硬件设计的过程中不可避免的需要对搭建的半成品来测试,以确定是不是能达到设计目标。常使用的仪器有电压表、电流表、示波器稳压电源等。因此对测试工具的掌握也成为硬件设计的必然要求。
模电中的三极管、MOS管、晶闸管运算放大器等都是电路设计中的基本元件。常用半导体元件、基本放大电路、多级放大电路、集成运算放大电路、反馈、信号的运算和处理、波形的发生和信号的转换、功率放大电路、直流电源模拟电子电路读图均依赖模电的知识以及上述电路分析知识。
在电路设计过程中,常要使用各类CPU以及各类集成IC,但芯片的各类参数和经典应用均需要查阅对应芯片的datasheet(数据手册),故需要对各厂商官网和其他数据手册下载途径知道。另外,由于大部分芯片由外国厂商设计制作,datasheet的语言多为英文,翻译版本较少,故需要对常见元器件的英文名有一定的熟悉度,并合理规划利用翻译软件进行文档理解。
电子电路仿真,是指使用数学模型来对电子电路的真实行为进行模拟的工程方法。在构建实际的电路之前,对设计进行仿真验证,可以大幅度地提高设计效率。这是由于,设计人能在构建电路之前,预先观察、研究电路的行为,而不必为电路的物理实现付出时间和经济的成本「防止炸板子」。
Multisim集成了业界标准的SPICE仿真以及交互式电路图环境,可即时可视化和分析电子电路的行为。其直观的界面可帮助教育工作者强化学生对电路理论的理解,高效地记忆工程课程的理论。研究人员和设计人员可借助Multisim减少PCB的原型迭代,并为设计流程添加功能强大的电路仿真和分析,以节省开发成本。
LTspice®是一款高性能SPICE 仿真软件、电路图捕获和波形观测器,并为简化模拟电路的仿真提供了改进和模型。LTspice 的下载内容中包括了用于大多数AnalogDevices开关稳压器放大器的宏模型,以及用于一般电路仿线、
软件对于一名嵌入式硬件研发人员来说,一款好的PCB设计软件,很大程度上能帮他们更高效的完成PCB设计,PCB设计软件的选择将直接影响学习工作的进度。
用户无需安装任何软件或插件,只需在任何支持HTML5、标准兼容的web浏览器打开立创EDA网页,即可开始你的设计。
云端技术的应用让立创EDA有别于传统设计方式,让设计者不再局限于一台电脑,能够随时随地的进行跨系统的团队协作。在一个设计团队中的不同成员,通过立创EDA可以在不同的设备、系统和地点实现设计的实时共享。设计的开源共享,使得广大新老用户可以找到很多想要的库文件,而不用再次耗费时间从头创建,有助于用户一同学习提高!
中的电容器可以相互切换,轮换休息,不仅不会影响补偿效果,还能使每个电容器拥有相同的检修周期和寿命长度。2、电容器不等量
学习内容0.2 物资准备1 C语言学习1.1 学习资料1.2 学习规划1.2.1 基础1.2.2 函数1.2.3 数组1.2.4 进阶2 Arduino培养方案2.1
的容量较大则必须将其分为多组才能进行自动跟踪补偿。已知补偿电容器有两种
码是一组固定长度的码组,可表示为(n , k),通常它用于前向纠错。在
【国产FPGA+OMAPL138开发板体验】(原创)5.FPGA的AI加速源代码
【米尔-全志T113-i开发板试用】JPG硬件编码的实现、YUV转换neon加速和对比测试
【先楫HPM5361EVK开发板试用体验】(原创)6.手把手实战红外线传感器源代码

